 设备报价表获取
设备报价表获取 产品手册获取
产品手册获取




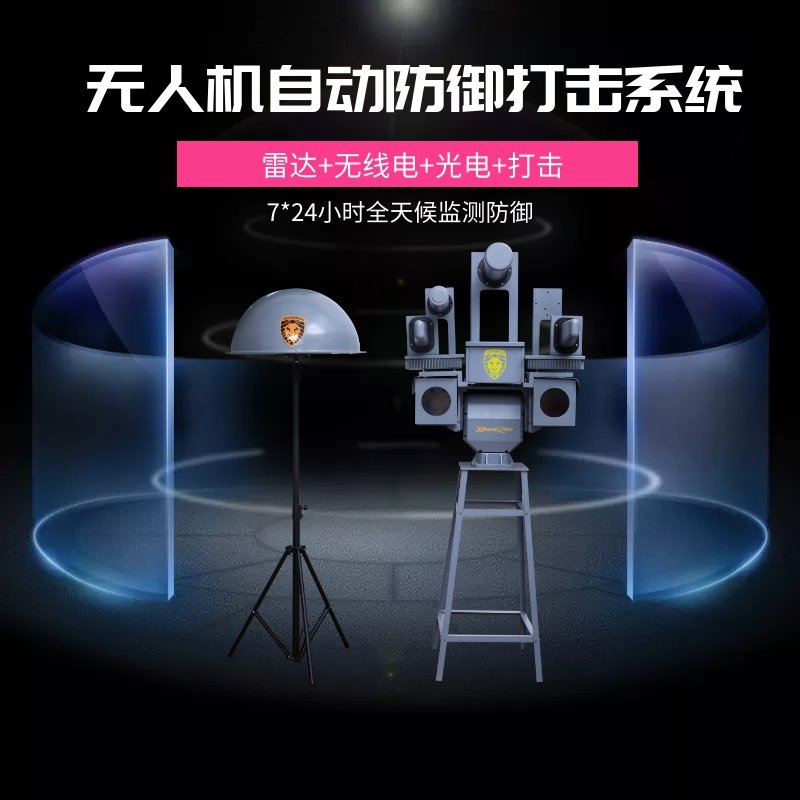
无人机防御系统
反无人飞行器系统由搜索系统、光电跟踪系统、射频干扰系统及显控单元四个主要分系统及模块构成。其中,搜索系统完成对任务区域低空目标的监视及位置指示功能,由搜索雷达和无线电频谱监测系统构成,两种体制的搜索系统可根据环境独立使用或配合起来使用以提高探测性能;光学跟踪系统完成对目标的自动跟踪功能,使得射频干扰系统的定向天线能够实时对准目标;射频干扰系统用于完成对目标无人机GPS和无线遥测链路的定向射频干扰功能,使得无人机失去控制,无法继续飞行;显控单元主要完成系统的状态监测、控制、态势显示及人机交互功能。
无线电频谱监测系统提供对无人机的远距离探测,搜索雷达提供对无人机的远距离探测,两者探测数据根据使用环境进行数据融合后,引导光电跟踪系统实现对无人机的可视化跟踪,最后,射频干扰系统屏蔽无人机的飞控信道和导航信号,驱离/迫降无人机。
1.系统功能
1)采用无源探测技术,360度探测多个目标发出的无线电信号,并根据信号定位目标所在的位置;
2)采用相控阵雷达探测技术,360度探测多个运动目标的位置、速度信息;
3)具有可见光、红外成像功能,能显示警戒区域的可见光与红外图像;
4)具有图像检测、识别、跟踪功能;
5)具有多波段干扰功能,能够干扰无人机的卫星导航链路、遥控链路、图传链路;
6)能够根据搜索系统的数据自动/手动搜索、跟踪目标;
7)具有数据存储功能,方便调查取证;
8)终端显控软件描述
2.系统特点
①探测能力强
有源与无源多波段双模探测,探测能力强;
信号实时采集、数据刷新率高;
全向360°无死角,探测范围广;
覆盖市场95%以上的主流无人机;
对目标的测角与测距精度高;
多目标批次处理,目标容量大
电子地图标记无人机位置;
多数据融合处理,探测概率高、虚警率低。
②跟踪性能好
弱小目标跟踪稳定;
抗背景干扰能力强,目标不丢失;
跟踪速度高;
像素级准确跟踪,精度高;
遮挡后记忆跟踪,智能程度高;
③干扰强度大
干扰体制优秀,方式灵活、干扰信号频点控制准确;
全向360°无死角,覆盖范围广
干扰模式多,强度大;
干扰频段足,覆盖频段广,带宽范围大;
丰富的扩展性能,干扰样式与噪声样式可调配;
干扰信号覆盖市场95%以上的主流无人机。
④操作简单、自动化程度高
数据融合处理,降低虚警率,减少人员工作量;
一键自动搜寻,智能检测;
远程控制设备启动/关闭,人机功效好;
多快捷键组合控制,让设备操作像玩游戏一样简单;
显控界面简洁,各传感信息、设备状态一目了然。
⑤全天时、环境适应性强、可靠性高
昼夜皆可稳定工作,有效防止无人机夜晚突袭;
浓雾、小雨天气条件下照常工作,环境适应能力强;
长时间连续工作,维护成本低。
⑥定制化系统,军用雷达标准,高精尖技术
本系统所带软件是公司专门针对反无人机系统在各种环境下应用的定制化软件,是集主动相控阵体制雷达、被动无线电探测雷达、光电探测系统以及定向射频干扰等多个设备的显示、控制以及联动工作于一体的指挥控制软件,而非一般的显控和监视软件,涉及数字地图、多传感器信息融合及指挥控制决策等多项目关键技术,开发技术难度高,研发投入大。
3.前端产品介绍
1)搜索系统
A.无线电频谱监测系统
无线电频谱监测系统被动截获无人机与遥控器之间的图传信号和遥控信号,实现对无人机的被动探测、侧向、识别与定位,产品如图:

无线电频谱监测系统
B.搜索雷达
雷达采用C波段,相控阵+收发全数字DBF技术体制,具有数据率高、重量轻、体积小、功耗低等优点,产品如图2
雷达工作在C波段,采用全数字有源相控阵的技术体制,通过模块化、精细化设计,综合运用自适应动目标检测、数字T/R(发射/接收)、DBF(数字波束形成)、模拟数字一体化设计等技术手段,具有低空探测性能好、机动跟踪能力强、测量精度高和成本低等特点,是一部探测无人机性能优异的相控阵雷达,可以实现重点监控区域无人机的探测、警戒和目标指示,为监控系统提供实时、准确、连续的空情和目标信息。产品图如下:

搜索雷达
搜索雷达由雷达主机和雷达终端两部分组成
雷达主机主要由4个独立的雷达阵面和一个综合控制盒组成。
每个阵面都是相对独立的探测系统,包括阵列天线、收发组件、射频数字集成模块、信号与数据处理模块等,完成信号放大发射和接收、DBF、多普勒滤波、CFAR检测和跟踪处理等,输出目标位置和特征信息。
综合控制盒由电源系统、系统时钟、集线器等模块组成,为各阵面提供电源、相参时钟,并将多阵面的输出信息集成到单路以太网通道输出。
雷达终端由加固计算机实现,完成雷达的控制、目标信息显示,当系统引入光电设备时,可实现与光电系统的联动。
雷达系统软件包括射频数字集成软件、信号和数据处理软件以及终端监控软件。
(1) 先进的技术体制
搜索雷达采用一维相扫的相控阵体制,方位上进行电扫描,波束指向灵活、快速,能实现无惯性的快速扫描,同时,可进行非均匀探测,针对不同区域采用不同的探测方案,提高总体探测性能。
采用基于全数字相控阵体制的软件化雷达设计方案,具有很强的扩展性和在线升级能力。
(2) 优良的低空探测能力
搜索雷达基于相控阵体制设计的多普勒滤波系统,完全消除了机扫雷达天线扫描调制所引起的杂波频谱扩散问题,波抑制能力能力更强,更有利于强杂波环境下发现和跟踪低空无人机目标。
(3) 可靠性高
搜索雷达无需机械旋转设备,不会因为机电故障而影响雷达工作,具有更高的可靠性;
同时,相对于单通道工作的抛物面雷达,相控阵雷达采用多通道并联工作,即使个别通道失效,仍能正常工作,提高了产品的任务可靠性。
(4) 安装简单、易用性强
搜索雷达采用模块化设计,结构简单、安装方便,无旋转关节,可以适用于不同的安装条件,具有集中和分离两种安装方式。
雷达对外接口简单,仅包括一个电源接口和一个网线接口,接线简单、方便。
雷达输出目标位置和特征信息,在配套的终端软件显示和操作,终端软件操作简单,易学易用。
技术特点
(1) 全数字有源相控阵技术体制,收发DBF技术;
(2) 自适应动目标检测和多普勒杂波抑制技术;
(3) 数字T/R技术和高集成的射频与数字一体化设计技术;
(4) 高机动目标稳定跟踪技术。
2)光电跟踪系统
光电跟踪系统由跟踪转台和光电舱构成,光电舱中装有非制冷红外焦平面探测器、高清可见光相机及图像处理板。光电跟踪系统根据搜索系统提供的目标位置信息,完成对目标的初始对准,随后在初始对准区域附近搜索目标,搜索过程中可通过自动识别或人工指定两种方式确认可疑目标,随后转入目标自动跟踪工作模式,使得光电传感器视轴以及安装于跟踪转台上的射频干扰天线能够实时对准目标。产品图:

光电跟踪系统
3)射频干扰系统
无人机准确定向射频干扰系统采用光电识别与自动跟踪技术、精密伺服控制技术及高增益定向射频干扰技术实现对无人机搜索系统(包括无源探测与定位设备、主动雷达及光电搜索设备等)探测到的可疑目标的二次搜索、准确定位及自动跟踪功能,并发射定向射频干扰信号,瘫痪无人机的卫星导航、无线遥控及无线图传链路,使得无人机失去按照预定航路继续飞行的能力,达到迫降或驱离无人机的目的。

射频干扰系统
1) 目标类型
各类消费类无人机或航模,如大疆“精灵”系列多旋翼无人机;
小型固定翼无人机;
滑翔伞及浮空气球等小型航空器;
部分军用微型或小型无人机或航空器。
2)引导方式
支持多种目标初始方位引导方式,能够根据无人机无源探测与定位设备、雷达、光电或其它引导设备提供的目标初始方位信息,实现对目标的二次搜索、准确定位与自动跟踪功能,从而保持高增益定向射频干扰天线实时准确对准目标。
系统支持如下几种引导方式:
无人机无源探测与定位设备;
主动雷达引导;
光电搜索系统引导;
人工输入方位引导;
支持其它引导方式扩展。
3)干扰链路
GPS\GLONASS\北斗卫星导航链路;
无人机无线遥测链路;
无人机无线图传链路。
4)干扰模式
阻塞式干扰:干扰信号覆盖无人机遥测与图传链路预知的多个频段,其特点是实现简单,不依赖任何外部设备,但存在干扰效率低以及对改造后的无线通信链路无法实施有效干扰等问题。
伴随式干扰:根据无人机无源探测与定位系统等外部电侦设备实时侦测到的目标遥测链路与图传链路的通信频点、信号带宽及跳频周期等信息,基于软件无线电架构的数字干扰源动态生成频点和带宽相匹配的干扰信号。该模式具有干扰效能高、针对性强以及实现简单等优点,但干扰效果严重依赖于外部侦测设备的探测性能及精度。
侦听式干扰:采用系统自带的侦听通道对无人机无线通信信号的特征进行实时处理和分析,数字干扰源根据分析结果动态生成频点和带宽相匹配的干扰信号,实现对无人机无线通信链路的有效干扰和压制。该方式是无人机射频干扰设备的技术发展趋势,具有干扰效能高、不依赖任何外部电侦设备等优点,但实现相对复杂,且对数字干扰机的信息处理能力要求较高。
4)显控终端
反无人机系统显控端软件在设计上分为界面显示前端与后台控制处理计算模块,界面显示前端负责显示搜索系统、光电跟踪系统、射频干扰系统的信息及状态,并集成常用的操作界面;后台控制处理计算模块是界面显示前端与前端产品的信息处理中枢,将搜索系统、光电跟踪系统、射频干扰系统的原始数据处理后,传递至界面显示前端,将操作指令综合处理后,发送至前端产品各分系统。